
【実証実験インタビュー】「起伏のある環境向け自律移動」の実証実験

実証実験名
「起伏のある環境向け自律移動」の実証実験
========================================
2020年10月5日(月)から2020年10月20日(火)にかけて、パナソニック アドバンストテクノロジー株式会社による「起伏のある環境向け自律移動」の実証実験を、大阪南港の商業施設「アジア太平洋トレードセンター(ATC)」および「舞洲エリア」にて実施いたしました。今回はプロジェクトリーダーである、パナソニック アドバンストテクノロジー株式会社の高橋三郎氏にお話を伺いました。

#まず、本実験の技術開発に取り組むことになった経緯を教えてください
当社は、パナソニック株式会社の組み込みシステム開発会社として創業しました。研究、製品設計、量産など、開発の全工程において多様なシステム開発の実績を保有しており、近年は家電製品だけでなく、車載システムやIoTシステムの分野にも取り組んでいます。また、5~6年前よりロボティクス分野にも本格的に参入し、自律移動システムに着目してきました。その中でロボットの自律移動に関して、障害物などの少ない平地移動には、ある程度の技術が確立されてきましたが、地面に起伏や傾斜のある環境下では、まだ多くの課題があることに注目し、今回の実証実験のテーマである「起伏のある環境向け自律移動」の開発を進めております。
#今回の実証実験の概要と目的を教えてください
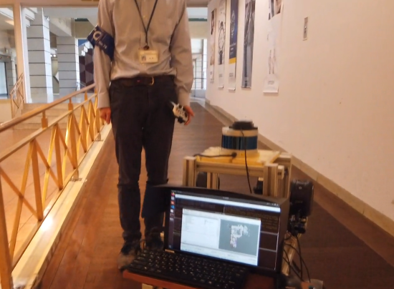
今回の実験では、当社が独自開発した3Dナビゲーション技術と拡張Visual Odometryを組み込んだ自律移動システムをパーソナルモビリティに実装し、自律移動実験を行って、データの収集・分析を実施しました。実証実験は3週間に渡って行い、10月5・6日、12・13日はATCの屋内外施設、19・20日は舞洲エリアを使用させていただきました。
実験の目的は大きく分けて2つです。
1つは3Dナビゲーションによる自律移動実験で、システムを搭載したパーソナルモビリティが地面に起伏のある環境下でも目的地へ到着できるかを検証しました。センサで周囲の情報を取得し、同システムが移動の不可避を判断して適切な経路を設定できるかが主な目的です。またその際、事前に作成した地図を用いた場合と、自走しながら地図を作成する場合の2パターンで評価・検証を行っています。
もう1つの目的は、拡張Visual Odometryによる位置推定精度の確認です。従来の車両では車輪の回転数などを用いて自己位置を推定しますが、車輪の回転情報が使えないロボットや環境において、効果的かつ高精度に自己位置を算出するモジュールであるVisual Odometryを独自のアルゴルズムで拡張したシステムの精度実験を行いました。

#実験を行った結果と感想を教えてください
まず、大きな事故やトラブルも無く、無事に実験を終えることができて良かったです。室内、屋外ともに走行可能な平地、緩やかな斜面、走行不可能な段差、斜面、不整地、障害物などの様々な走行環境を正確に認識し、実環境におけるナビゲーションができることを確認できました。。実験データについても、有益な情報が多く収集できました。特に、さまざまな環境におけるセンサの得手不得手が判明したのが大きく、今後はシチュエーションや場面に合わせて、最適なハードウェアとソフトウェアの組み合わせを見つけるためのきっかけになりました。
また実験の場として、今回のATCや舞洲エリアを利用させていただいたことには感謝しています。ATC施設内は店舗があったり、段差や傾斜があったり、壁やガラスなどの種類もさまざまであったりと、極めて現実的でリアルな環境です。関西でこの環境で実証実験が行える場所としては、唯一無二だと思います。加えて、今回は不定形の地形を含む自然環境の多い舞洲エリアでも実証実験を行うことができたのも良かった点です。Visual Odometryの精度実験においては、非常に有益な情報が取得できました。来年度も引き続き、実証実験で利用させていただければと思っています。

#今後の展開について教えてください
今後は実証実験で得たデータを分析して、より精度と実用性の高いソフトウェアプラットフォームへと進化させていきます。その上で、当社は技術力がストロングポイントの会社ですので、今回使用したパーソナルモビリティだけでなく、モビリティ全般に利用可能なソフトウェアとハードウェアのセットを開発、提供していきたいと考えています。具体的に言えば、農業や工場で使われる搬送ロボットなどでも、今回の技術は応用できると思っていますので、それらを開発・生産している企業様との協業なども視野に入れて進めていきたいですね。

取材・文 中西 義富(Office Vinculo)
この記事を共有する
